Association Méridienne![]() Atelier
Atelier![]() Positionnement par satellites artificiels
Positionnement par satellites artificiels
Positionnement par satellites artificiels
Les matériels GPS de Méridienne
Simulateur
Ce système conçu et réalisé par l'association Méridienne est destiné à expliquer les principes de base du fonctionnement du positionnement par satellites à un public non scientifique. La maquette est simplifiée : 6 satellites sur 3 orbites inclinées.
Unité centrale du simulateur - Photo Méridienne

Quand on déplace le récepteur simulé à la surface de la terre, les satellites "captés" et les distances entre ceux-ci
et le récepteur varient.
Dans la simulation, on "ralentit" énormément la vitesse de propagation des ondes. Une note de musique est associée à
chaque satellite.
On peut ainsi voir et entendre les différences entre les temps de trajet des signaux émis par les satellites à leur
arrivée au récepteur et ressentir concrètement
l'influence de la position de celui-ci.
Les coordonnées (latitude et longitude arrondies au degré) et un indicateur de qualité géométrique pour chaque
satellite sont ensuite affichés.
Le système de contrôle par des stations au sol est également simulé, ainsi que la désynchronisation progressive des satellites , et leur re-synchronisation.
Récepteur
Ce récepteur GPS "pédagogique", également réalisé par l'association Méridienne, fonctionne réellement. Il utilise une antenne et un module GPS (Ublox Neo6), un microcontrôleur Arduino pour analyser les informations captées et produire divers affichages sur PC ou tablette :
- position calculée : latitude et longitude, environ une fois par seconde
- heure de référence du système GPS
- satellites utilisés pour le calcul
- flux d'informations codifiées selon le protocole NMEA
- éphémérides des satellites (en simulation)
- export de la latitude et de la longitude vers un tableur pour analyse de l'évolution du résultat dans le temps.
Principe du positionnement par satellites
Des satellites artificiels dont la position est connue avec précision émettent en permanence des messages radio
comprenant le code permettant d'identifier le
satellite émetteur, l'heure d'émission du signal et des informations de positionnement de ce satellite.
Le récepteur, situé par exemple sur le navire ou dans le véhicule, identifie les satellites dont il capte les
signaux et calcule la distance entre lui et chacun
de ces satellites.
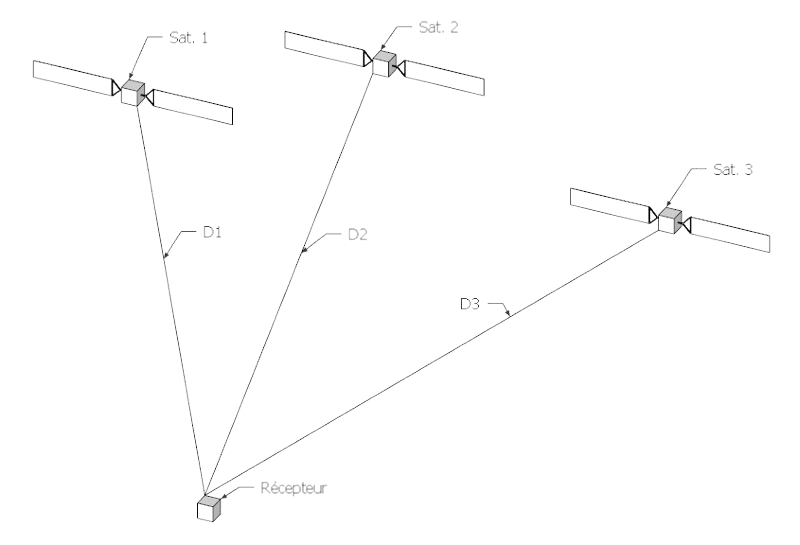
La distance satellite - récepteur est donnée par la formule :
D = (heure arrivée signal – heure émission signal) × vitesse de propagation
À partir de ces données géométriques - positions des satellites et distances D1, D2, D3, ... - le récepteur calcule et affiche la position du récepteur sous forme de latitude et longitude.
Composants d'un système
Un système de positionnement par satellites ou GNSS (Global Navigation Satellite System) est composé de
- satellites artificiels
- un ensemble de 24 à 30 satellites situés à une altitude d'environ 20 000 km. et répartis sur plusieurs orbites inclinées sur l'équateur.
- système de contrôle
- un ensemble de stations fixes au sol pour
- relever en permanence la position de chaque satellite, les informations de son horloge, communiquer ces données au centre de calcul central
- entretenir l'heure de référence et calculer toutes les corrections à communiquer aux satellites
- envoyer ces informations aux satellites pour mettre à jour les éphémérides de chacun de ceux-ci.
- récepteurs
- Ces récepteurs sont soit des appareils dédiés, soit des composants intégrés dans des smartphones, des véhicules, etc. Dans leur immense majorité, ce sont des produits peu coûteux, destinés au grand public.
Mise en œuvre
Si le principe est simple, la mise en oeuvre d'un système global de positionnement par satellite est extrêmement complexe.
Mesure précise du temps
la vitesse de propagation des ondes radio est celle de la lumière dans le vide, soit pratiquement 300 000 km/s (299 792 458 m/s). Une erreur de 1 millionième de seconde sur la mesure du temps de transit du signal entraîne donc une erreur de distance de 300 m. !
Les satellites sont équipés d'horloges atomiques fournissant une heure d'une précision suffisante, d'autant plus que celles-ci sont supervisées plusieurs fois par jour par une horloge de référence située sur terre dont la précision est encore beaucoup plus élevée (1 seconde d'erreur pour 300 millions d'années dans le cas du système GPS) et qui indique à chaque satellite le décalage de son horloge par rapport au temps de référence.
Les récepteurs, pour des raisons de coût, ne peuvent être équipés d'horloges aussi précises et sont équipés
d'horloges à quartz. Un décalage de
10 millisecondes par jour, commun avec ce type de technologie, correspond à une erreur de distance de 3000 km. !
Sans entrer dans les détails, on peut résoudre cette difficulté de la manière suivante :
le décalage entre l'horloge du récepteur et le temps de référence doit être considéré comme une inconnue
supplémentaire qui vient s'ajouter aux trois inconnues
X, Y, et Z qui sont les coordonnées du récepteur dans le système de coordonnées de Kepler (voir annexe en fin de
page).
Il faudra donc 4 équations, donc utiliser au moins 4 satellites pour résoudre ce système à 4 inconnues. Si plus de 4
satellites peuvent être captés et utilisés,
le calcul de position sera plus fiable et plus précis.
Perturbations
Plusieurs types de perturbations peuvent intervenir :
- Traversée de l'ionosphère et de la troposphère
La vitesse de propagation du signal radio est légèrement modifiée par ces couches de l'atmosphère terrestre, et ceci de manière variable. Les algorithmes de calcul des récepteurs courants ne peuvent donc apporter qu'une correction standard partielle. - Obstacles terrestres
Dans les zones de montagne ou en ville, des obstacles peuvent cacher certains satellites rendant leur nombre insuffisant pour faire le calcul de la position ou provoquer des échos d'ondes venant fausser les calculs. - Décalages orbitaux
Les satellites sont soumis à l'attraction terrestre, mais aussi, très faiblement, à celles du soleil et de la lune, ce qui provoque des modifications très faibles de leurs trajectoires. Ces modifications sont indiquées dans les éphémérides de chaque satellite et les calculs de positionnement en tiennent compte.
Théorie de la relativité
- Influence de la vitesse
Les satellites se déplacent à une vitesse de près de 4000 m/s. La relativité restreinte indique qu'à cette vitesse, le temps de l'horloge de bord est ralenti de 7 microsecondes par jour par rapport à une horloge immobile. - Influence de la gravité plus faible
Le champ de gravité est plus faible à l'altitude des satellites qu'à la surface de la terre. La relativité générale indique que cela accélère le temps de la même horloge de 45 microsecondes par jour.
Les deux effets se compensent partiellement, le résultat étant une avance de 38 microsecondes par jour. Ceci correspondrait à une erreur de distance de 11400 m si l'on ne tenait pas compte de la relativité dans le calcul de la position.
Principaux systèmes
Le système GPS
Le système GPS, mis en place par l'armée américaine et également connu sous le nom de Navstar, est composé de 30
satellites (24 opérationnels + 6 en réserve).
Ces satellites sont régulièrement répartis sur 6 orbites circulaires dont les plans forment un angle de 55 ° avec
celui de l'équateur. Ils sont à une altitude
de 20 184 km.
Le système est opérationnel depuis 1995. Depuis 2000, la précision maximum est disponible pour les usagers civils.
Le système GLONASS
Le système russe GLONASS, dans sa configuration actuelle, est composé de 30 satellites (24 opérationnels + 6 en
réserve). Ces satellites sont régulièrement
répartis sur 3 orbites circulaires à une altitude de 19 100 km.
Le système est opérationnel depuis 2010 dans cette configuration.
Le système GALILEO
Le système européen Galileo sera, dans sa configuration future, composé de 30 satellites (24 opérationnels + 6 en
réserve). Ces satellites seront régulièrement
répartis sur 3 orbites circulaires à une altitude de 23 222 km.
Suite au lancement de 4 satellites le 17 novembre 2016, le système Galiléo dispose de 15 satellites opérationnels en
fin 2016. Une mise en service incomplète a
été effectuée le 15 décembre 2016.
Des lancements complémentaires de satellites GALILEO sont prévus de 2017 à 2020 et le système complet devrait être
opérationnel en 2020.
Les récepteurs permettant d'utiliser les satellites GALILEO vont arriver rapidement sur le marché, les premiers
composants électroniques étant disponibles fin 2016.
Une compatibilité partielle entre les systèmes GPS, GLONASS et GALILEO permet, depuis le 15 décembre 2016, de
calculer un positionnement en utilisant conjointement
des satellites de ces différents systèmes.
Le système BEIDOU
Le système chinois, également connu sous le nom de COMPASS, est dans sa configuration actuelle, composé de 15
satellites. Il n'assure pas encore une couverture
mondiale.
Dans sa version future, prévue pour 2020, il sera composé de 35 satellites et assurera une couverture globale. Il
devrait être compatible avec les autres systèmes
(GPS, GLONASS et Galileo).
Webographie
Le système GPS
https://fr.wikipedia.org/wiki/Global_Positioning_System
http://www.gps.gov/french.php
http://lpc2e.cnrs-orleans.fr/~ddwit/gps/cours-GPS.pdf
https://web.ti.bfh.ch/~cip1/gps/
http://www.snastro.org/media/J-LC_GPS.PDF
http://www.genie-des-maths.polymtl.ca/exemples/ex-00019/ex1.pdf
http://villemin.gerard.free.fr/Multimed/GPSfonct.htm
Le système GLONASS
https://fr.wikipedia.org/wiki/GLONASS
Le système Galileo
https://fr.wikipedia.org/wiki/Galileo_(système_de_positionnement)
http://m.esa.int/Our_Activities/Navigation/Galileo/What_is_Galileo
https://galileo-mission.cnes.fr/
Le système Beidou
https://fr.wikipedia.org/wiki/Beidou
Les systèmes de coordonnées
https://fr.wikipedia.org/wiki/Système_de_coordonnées_(cartographie)
Bibliographie
BT Espace. Le positionnement par satellites. Centre National d'Etudes Spatiales. Presse et Éditions du Mouvement Freinet.
Annexe : le système de coordonnées de Kepler
O est le centre de la terre.
L'axe OX est situé dans le plan de l'équateur et passe par le point vernal.
L'axe OY est situé dans le plan de l'équateur et est perpendiculaire à l'axe OX.
L'axe OZ est l'axe de rotation de la terre.
Ce repère ne tourne pas avec la terre.